First part recap¶
Imitation Learning
Meta-learning for action-based models:
improve classifier by generating training from demonstrations
Rollin¶
For each training instance:
- construct an action sequence,
- incrementally transform initial to terminal state.
- Available actions wrt transition system.
Rollin¶
For each training instance:
- construct an action sequence,
- incrementally transform initial to terminal state.
- Available actions wrt transition system.
Rollout¶
Or perform rollouts to cost the actions:
- can use non-decomposable loss functions,
- e.g. V-DAgger, SEARN, LOLS
Part 2: NLP Applications and practical advice¶
- Applications:
- dependency parsing
- natural language generation
- semantic parsing
- Practical advice
- making things faster
- debugging
Applying Imitation Learning to Dependency Parsing
[Goldberg and Nivre 2012](http://www.aclweb.org/anthology/C12-1059)
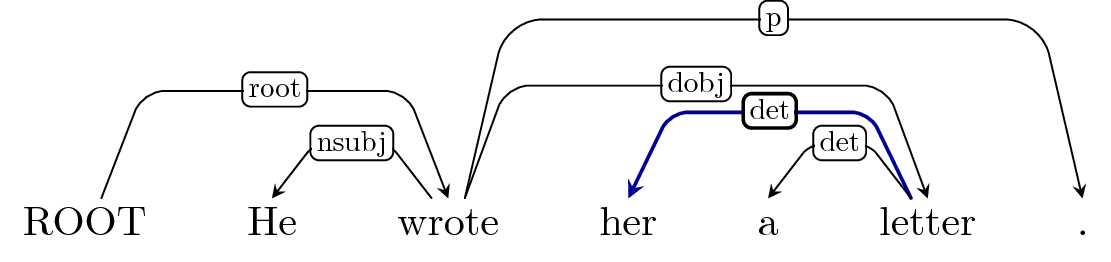
Dependency parsing¶

To represent the syntax of a sentence as directed labeled arcs between words.
- Labels represent dependencies between words.
DAgger Reminder¶
\begin{align} & \textbf{Input:} \; D_{train} = \{(\mathbf{x}^1,\mathbf{y}^1)...(\mathbf{x}^M,\mathbf{y}^M)\}, \; \text{expert}\; \pi^{\star}, \; \text{classifier} \; H\\ & \text{set training examples}\; \cal E = \emptyset ,\; \color{red}{\pi^{\star}\; \mathrm{probability}\; \beta=1}\\ & \mathbf{while}\; \text{termination condition not reached}\; \mathbf{do}\\ & \quad \color{red}{\text{set rollin policy} \; \pi^{in} = \beta\pi^{\star} + (1-\beta)H}\\ & \quad \mathbf{for} \; (\mathbf{x},\mathbf{y}) \in D_{train} \; \mathbf{do}\\ & \quad \quad \color{red}{\text{generate trajectory} \; \hat \alpha_1\dots\hat \alpha_T = \pi^{in}(\mathbf{x},\mathbf{y})}\\ & \quad \quad \mathbf{for} \; \hat \alpha_t \in \hat \alpha_1\dots\hat \alpha_T \; \mathbf{do}\\ & \quad \quad \quad \color{red}{\text{ask expert for } \underline{\text{a set of best actions}}\; \{\alpha_{1}^{\star}\dots\alpha_{k}^{\star}\} = \pi^{\star}(\mathbf{x},S_{t-1})} \\ & \quad \quad \quad \text{extract features} \; \mathit{feat}=\phi(\mathbf{x},S_{t-1}) \\ & \quad \quad \quad \cal E = \cal E \cup (\mathit{feat},\alpha^{\star})\\ & \quad \text{learn}\; H \; \text{from}\; \cal E\\ & \quad \color{red}{\text{decrease} \; \beta}\\ \end{align}
To apply Imitation Learning on any task, we need to define:
- Transition
- Loss function
- Expert policy
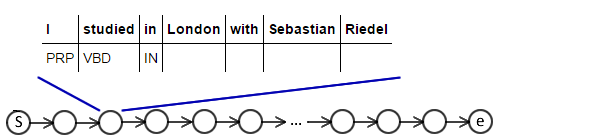
Transition system?¶
We can assume any transition-based system (e.g. Arc-Eager).
State: arcs, stack, and buffer.
Action space:
Shift, Reduce, Arc-Left, and Arc-Right.</span>
- Arc-Left / Arc-Right combine with arc labels,
- but limited #labels in dependency parsing (~50).
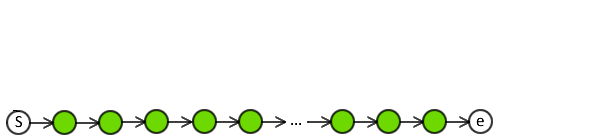
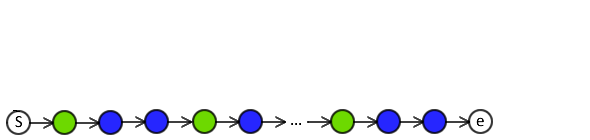
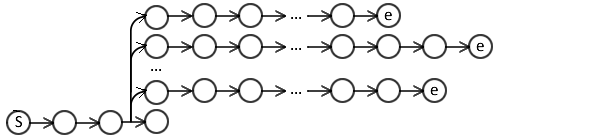
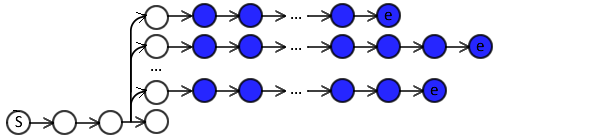
The length of the transition sequence is variable.
Shift -> Shift -> Arc-Right -> Shift -> ... -> Arc-Left
- Bounded (but not fixed) by length of sentence.
- In what task would it be fixed? POS tagging!
...
Buffer: ROOT, 'economic', 'news', 'had', 'little', 'effect', 'on', 'financial', 'markets', '.'
Shift
Buffer: 'economic', 'news', 'had', 'little', 'effect', 'on', 'financial', 'markets', '.' </font>
Shift
Buffer: 'news', 'had', 'little', 'effect', 'on', 'financial', 'markets', '.' </font>
Arc-Left: amod
Buffer: 'news', 'had', 'little', 'effect', 'on', 'financial', 'markets', '.'
Shift
Buffer: 'had', 'little', 'effect', 'on', 'financial', 'markets', '.' </font>
Arc-Left: nsubj
Buffer: 'had', 'little', 'effect', 'on', 'financial', 'markets', '.'
and so on
Buffer: -
Loss function?¶
Hamming loss: given predicted arcs, how many parents and labels were incorrectly predicted?
- Directly corresponds to attachment score metrics used to evaluate dependency parsers.
- Costs dependencies, not actions directly.
- Decomposable? Not with this transition model! Cannot score Shift independent of Arc-Right!
Expert policy?¶
Returns the best action at the current state by looking at the gold standard assuming future actions are also optimal:
$$\alpha^{\star}=\pi^{\star}(S_t, \mathbf{y}) = \mathop{\arg \min}_{\alpha \in {\cal A}} L(S_t(\alpha,\pi^{\star}),\mathbf{y})$$How do we make an expert policy?¶
We can derive a static transition sequence from initial to terminal state using the golden standard.
- Static expert policy.
Static expert does not take previous actions into account.
Static expert has not encountered this state before.
- Cannot know which is the optimal action.
- May default to an action (e.g. Shift).
A static expert may be sufficient for tasks where we do not care whether the previous actions were optimal.
- What would such a task be? POS tagging.
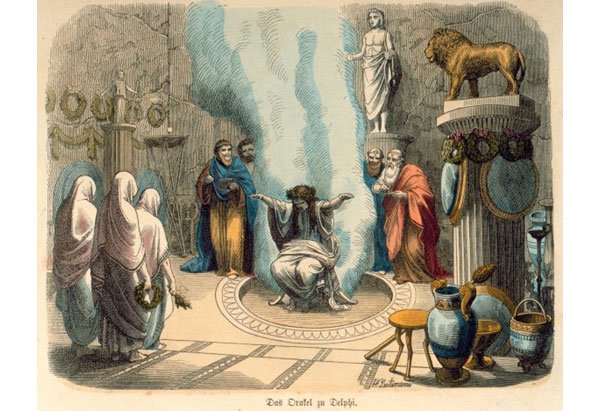
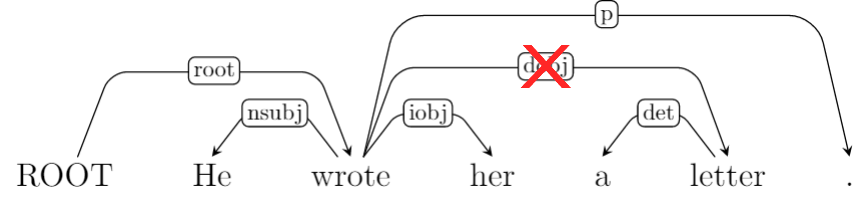
Rollin mistakes in dependency parsing¶
Let's assume that we rollin using the classifier.
Arc-Right: iobj ?

Buffer: 'her', 'a', 'letter', '.'
Shift

Buffer: 'a', 'letter', '.' </font>
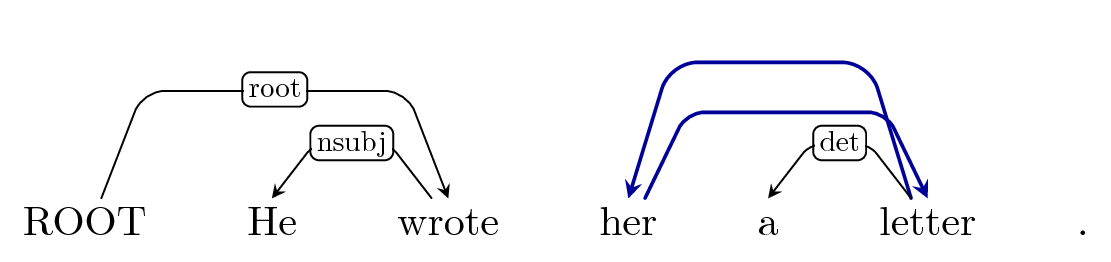
Default: Shift
Buffer: 'letter', '.' </font>
Arc-Left: det

Buffer: 'letter', '.'
Default: Shift
Buffer: '.' </font>
Default: Shift
Buffer: - </font>
Static expert policy cannot recover from errors in the rollin.
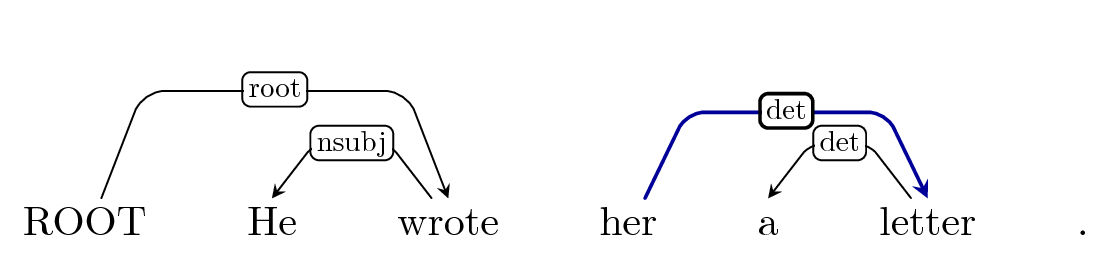
Also, what if there are multiple correct transitions?¶
 Stack: 'her'
Stack: 'her'
Buffer: 'a', 'letter', '.'
Two possible actions: Reduce 'her' / Shift 'a'
Static expert policy arbitarilly choses.
- But chosing any one action indirectly labels the alternative actions as incorrect!
- Leads to noise in the training signal.
Dynamic expert policy¶
Determines best action, by considering the previous actions.
- Can recover from errors.
- Allows for multiple optimal actions at each time-step.
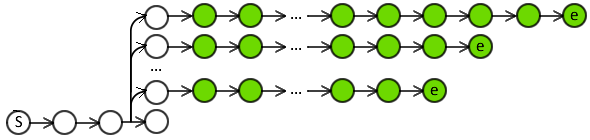
Reachable terminal state¶
Reachable terminal state:
- Can be reached through a sequence of expert actions $\alpha_1^{\star}\dots \alpha_T^{\star}$, and
- no further actions can be taken at that state.
- For an optimal reachable terminal state, $L(S_{final}, \mathbf{y}) = 0$.
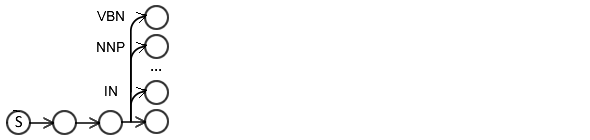
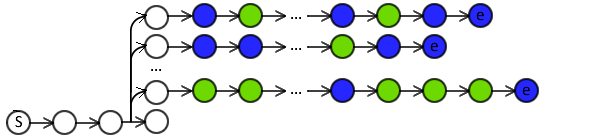
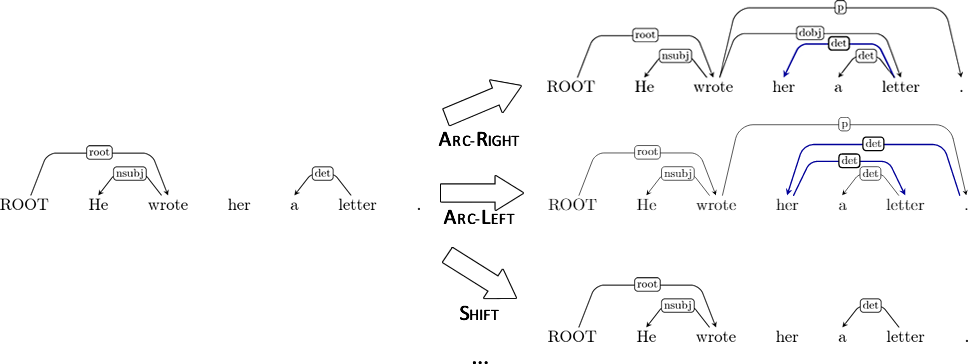
How does a dynamic expert policy work?¶
For each possible action at a time-step:
- ...
...
Buffer: 'letter', '.'
How does a dynamic expert policy work?¶
For each possible action at a time-step:
- Arc-Left? Arc-Right? Reduce? Shift?
Buffer: 'letter', '.'
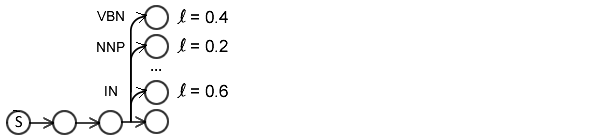
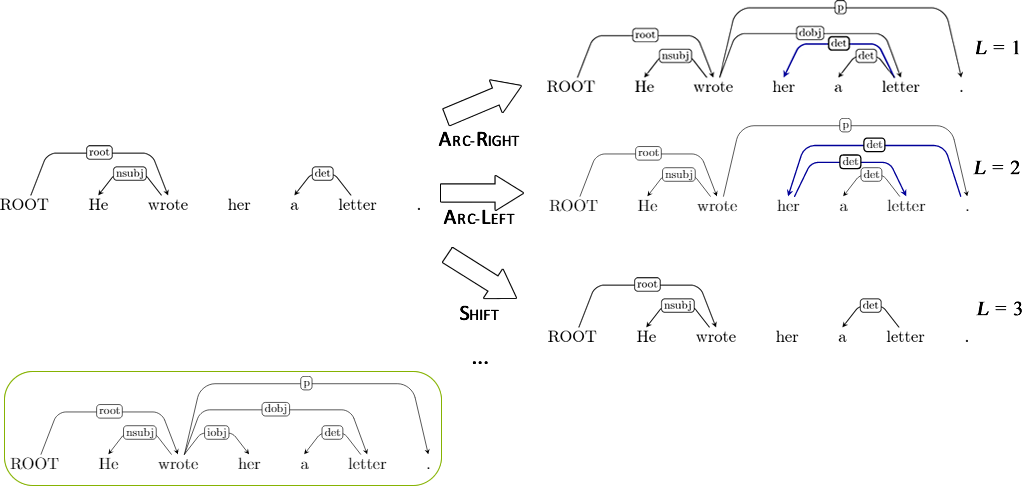
How does a dynamic expert policy work?¶
For each possible action at a time-step:
- Arc-Left? Arc-Right? Reduce? Shift?
- Determine the reachable terminal state.
- Use full rollout with expert?
Arc-Left: det?
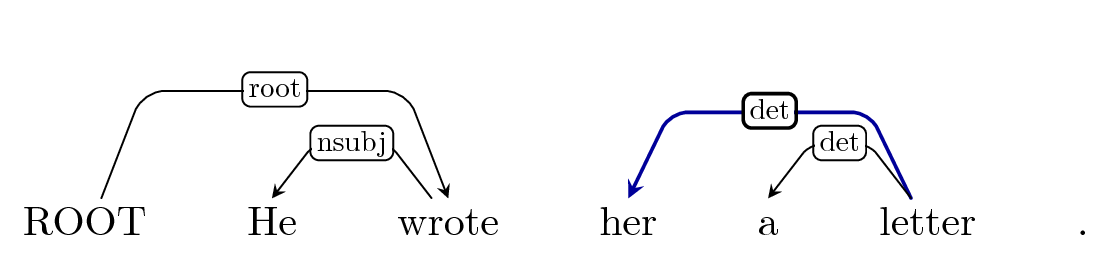
Buffer: 'letter', '.'
Arc-Right: dobj
Buffer: '.'
Arc-Right: p
Buffer: -
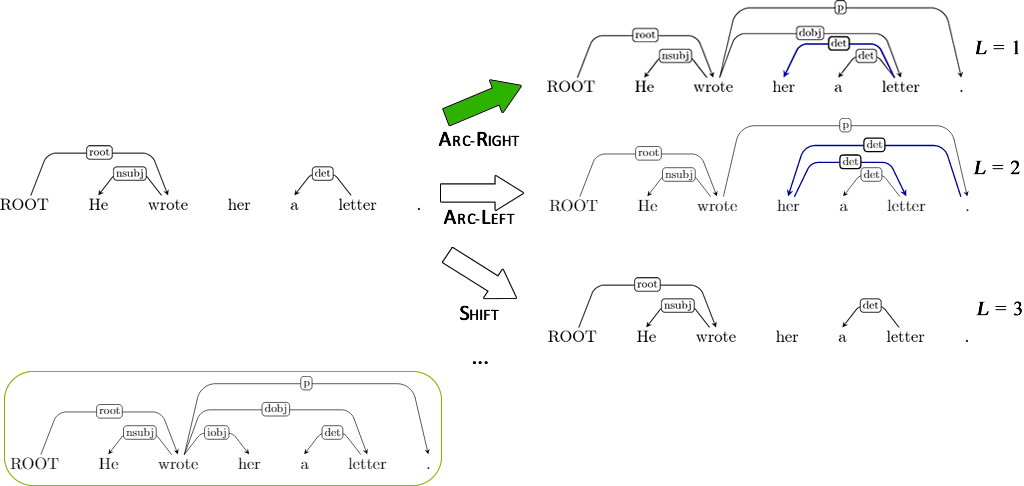
Full rollouts may be expensive¶
Instead of full expert rollout, we may use heuristics!
- i.e. can we estimate how an action will effect the reachable terminal state?
Arc-Right: det?
Buffer: '.'
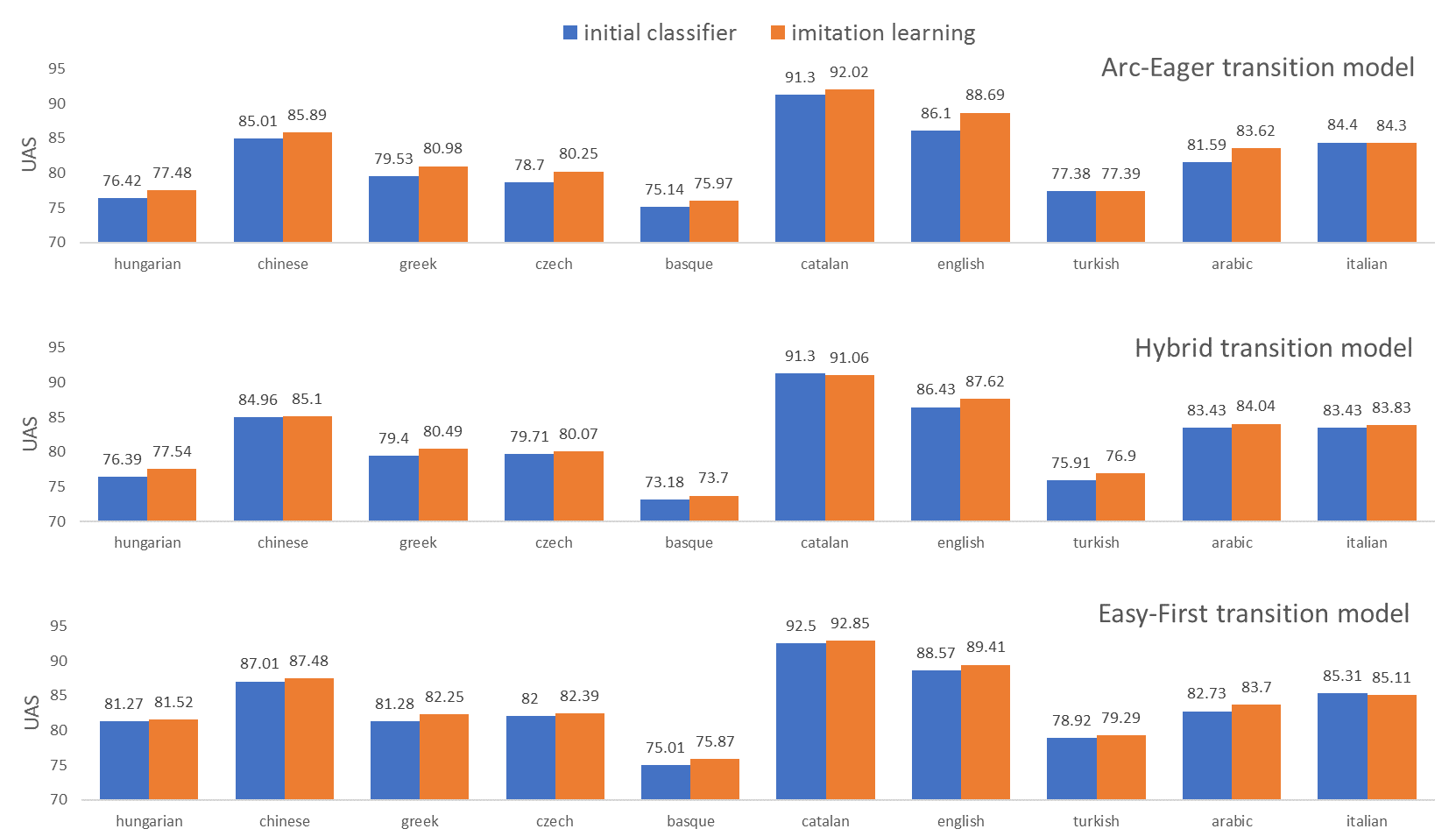
Results[Goldberg and Nivre 2012](http://www.aclweb.org/anthology/C12-1059)
¶