Applying Imitation Learning on Semantic Parsing
[Goodman et al. 2016](http://aclweb.org/anthology/P16-1001)
Semantic parsing¶
Semantic parsers map natural language to meaning representations.
- Need to abstract over syntactic phenomena,
- resolve anaphora,
- and eliminate ambiguity in language.
- Essentially the inverted task of NLG.
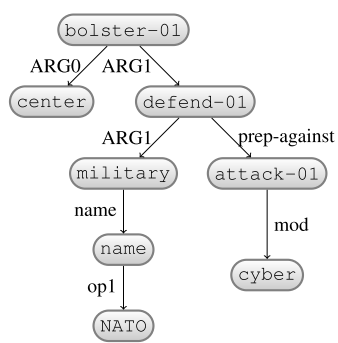
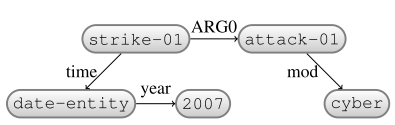
Abstract meaning representation¶
(Banarescu et al. 2013)¶
A MR formalism where concept
relations are represented in a DAG.
- Abstracts away from function words, and inflection.
- Transition-based approaches are common.
[AMR tutorial by Schneider et al. 2015](https://github.com/nschneid/amr-tutorial/tree/master/slides)
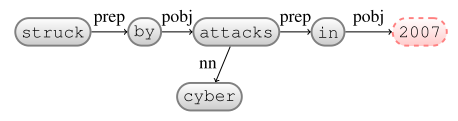
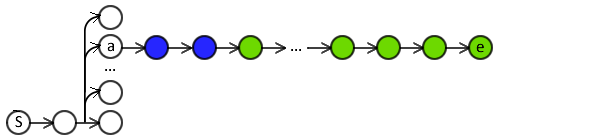
Transition system?¶
We consider a dependency tree as input.
- Dependency tree is derived from input sentence.
State: nodes, arcs, $\sigma$ and $\beta$ stacks.
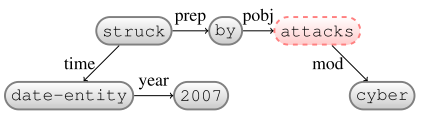
- In intermediate states, nodes may be labeled either with words, or AMR concepts.
E
$\beta$: -
Insert: date-entity
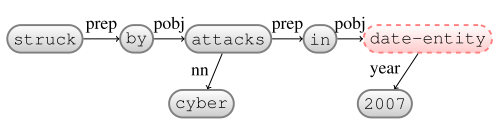
$\beta$: -
ReplaceHead: in
$\beta$: -
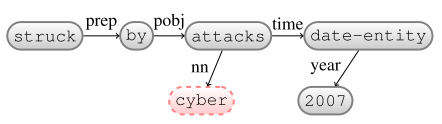
Reattach: date-entity
$\beta$: -
ReplaceHead: by
$\beta$: -
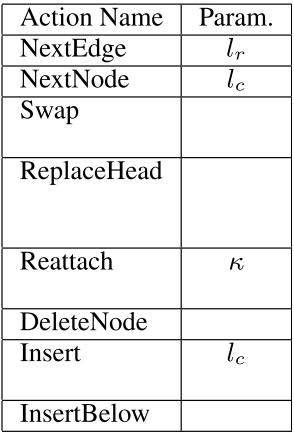
Action space¶
Actions combine with labels
(PropBank framesets).
- #labels in the order of 103 to 104.
- Performing rollouts for all actions may be time-consuming.
The length of the transition sequence is variable.
- In the range of 50-200 actions.
- Need to prevent cycles between state transitions!
... -> Swap($e_i$, $e_j$) -> Swap($e_j$, $e_i$) -> ...
Also, transition system to preserve acyclicity and
full connectivity in the graph.
Loss function?¶
Smatch (Cai and Knight, 2013)
- F1-Score between predicted and gold standard AMR.
- Calculates all possible mappings of nodes.
- Computationally expensive for every rollout
(NP-complete).
Naive Smatch employs heuristics.
- How many labels and edges in the predicted and gold standard are not present in both?
- Decomposable? No!
- To encourage short sequences,
a length penalty is applied to the loss.
Expert policy?¶
A set of heuristic rules, based on alignments between nodes in dependency tree and AMR graph.
- Mapped nodes and edges may need to be renamed.
- Unmapped nodes may need to be inserted or deleted.
- Suboptimal? Yes!
V-DAgger reminder¶
\begin{align} & \textbf{Input:} \; D_{train} = \{(\mathbf{x}^1,\mathbf{y}^1)...(\mathbf{x}^M,\mathbf{y}^M)\}, \; expert\; \pi^{\star}, \; loss \; function \; L, \\ & \quad \quad \quad learning\; rate\; p\\ & \text{set} \; training\; examples\; \cal E = \emptyset \\ & \mathbf{while}\; \text{termination condition not reached}\; \mathbf{do}\\ & \quad \color{red}{\beta = (1 - p)^i}\\ & \quad \color{red}{\text{set} \; rollin/out \; policy \; \pi^{in/out} = (1-\beta) H + \beta \pi^{\star}}\\ & \quad \mathbf{for} \; (\mathbf{x},\mathbf{y}) \in D_{train} \; \mathbf{do}\\ & \quad \quad \text{rollin to predict} \; \hat \alpha_1\dots\hat \alpha_T = \pi^{in/out}(\mathbf{x},\mathbf{y})\\ & \quad \quad \mathbf{for} \; \hat \alpha_t \in \hat \alpha_1\dots\hat \alpha_T \; \mathbf{do}\\ & \quad \quad \quad \mathbf{for} \; \alpha \in {\cal A} \; \mathbf{do}\\ & \quad \quad \quad \quad \text{rollout} \; S_{final} = \pi^{in/out}(S_{t-1}, \alpha, \mathbf{x})\\ & \quad \quad \quad \quad cost\; c_{\alpha}=L(S_{final}, \mathbf{y})\\ & \quad \quad \quad \text{extract } features=\phi(\mathbf{x}, S_{t-1}) \\ & \quad \quad \quad \cal E = \cal E \cup (features,\mathbf{c})\\ & \quad \text{learn classifier} \; \text{from}\; \cal E\\ \end{align}
Exploration variations¶
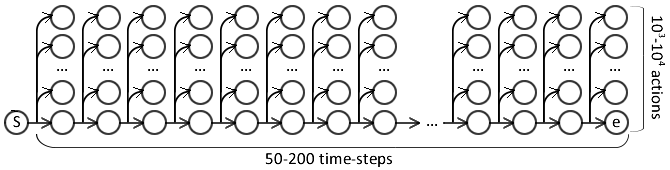
Rollout for 50-200 time-steps, and 103 to 104 actions.
Partial exploration is used by SCB-LOLS ([Chang et al., 2015](https://arxiv.org/pdf/1502.02206.pdf)).
- Randomly select time-steps and actions to rollout.
Exploration variations¶
Rollout for 50-200 time-steps, and 103 to 104 actions.
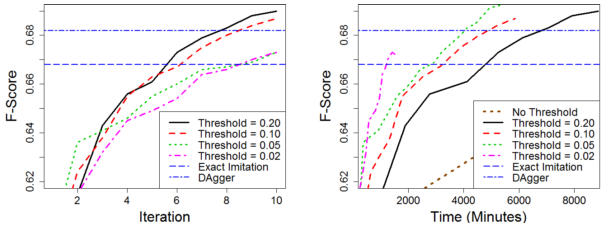
Targeted exploration is used by [Goodman et al. 2016](http://aclweb.org/anthology/P16-1001):
- Perform rollout only for the expert policy action,
- and actions scored within a threshold $\tau$ from the best.
- In first epoch (no classifier), randomly rollout actions.
Step-level stochasticity¶
V-DAgger and SEARN use step-level mix during roll-out.
- Each rollout step either by classifier or expert.
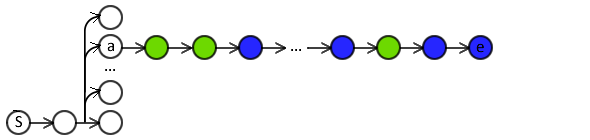
Step-level stochasticity¶
V-DAgger and SEARN use step-level mix during roll-out.
- Each rollout step either by classifier or expert.
- Rollout on same $a$ may result on different sequence.
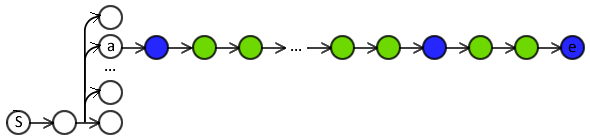
Step-level stochasticity causes high variance in training signal.
- Use LOLS instead?
- Sequence too long for full expert policy rollout.
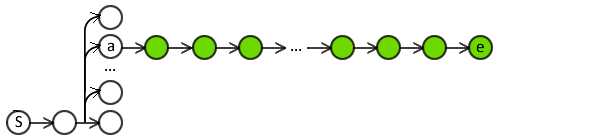
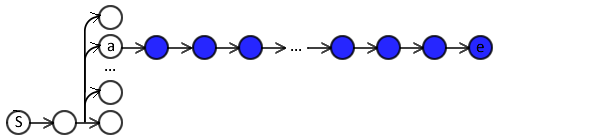
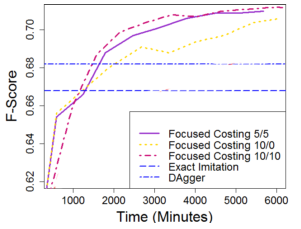
Focused costing¶
Introduced by Vlachos and Craven, 2011.
- Use the classifier for first $b$ steps of rollout,
- use expert policy for the rest.
Classifier costing focused on immediate actions.
- No errors in distant actions of the rollout.
- Gradually increase $b$.
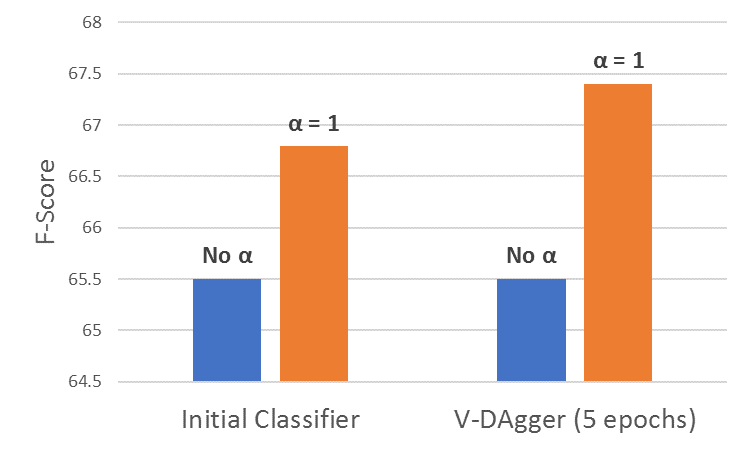
$a$-bound¶
Introduced by Khardon and Wachman (2007).
Reduce training noise by ignoring noisy training instances.
During training, if the classifier makes > $a$ mistakes on a training instance:
- Exclude instance from future training iterations.
- Related to Coaching (He et al., 2012)